 Description
DescriptionThe HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like bats do. It offers excellent non-contact range detection with high accuracy and stable readings in an easy-to-use package. It comes complete with ultrasonic transmitter and receiver modules.
Features
Here’s a list of some of the HC-SR04 ultrasonic sensor features and specs:
Power Supply :+5V DC
Quiescent Current : <2ma p="">Working Current: 15mA
Effectual Angle: <15 p="">Ranging Distance : 2cm – 400 cm/1″ – 13ft
Resolution : 0.3 cm
Measuring Angle: 30 degree
Trigger Input Pulse width: 10uS
Dimension: 45mm x 20mm x 15mm
How Does it Work?
The ultrasonic sensor uses sonar to determine the distance to an object. Here’s what happens:
The transmitter (trig pin) sends a signal: a high-frequency sound.
When the signal finds an object, it is reflected and…
… the transmitter (echo pin) receives it.

HC-SR04 Ultrasonic Sensor Pinout

Pins
VCC: +5VDC
Trig : Trigger (INPUT)
Echo: Echo (OUTPUT)
GND: GND
Schematics
Follow the next schematic diagram to wire the HC-SR04 ultrasonic sensor to the Arduino.
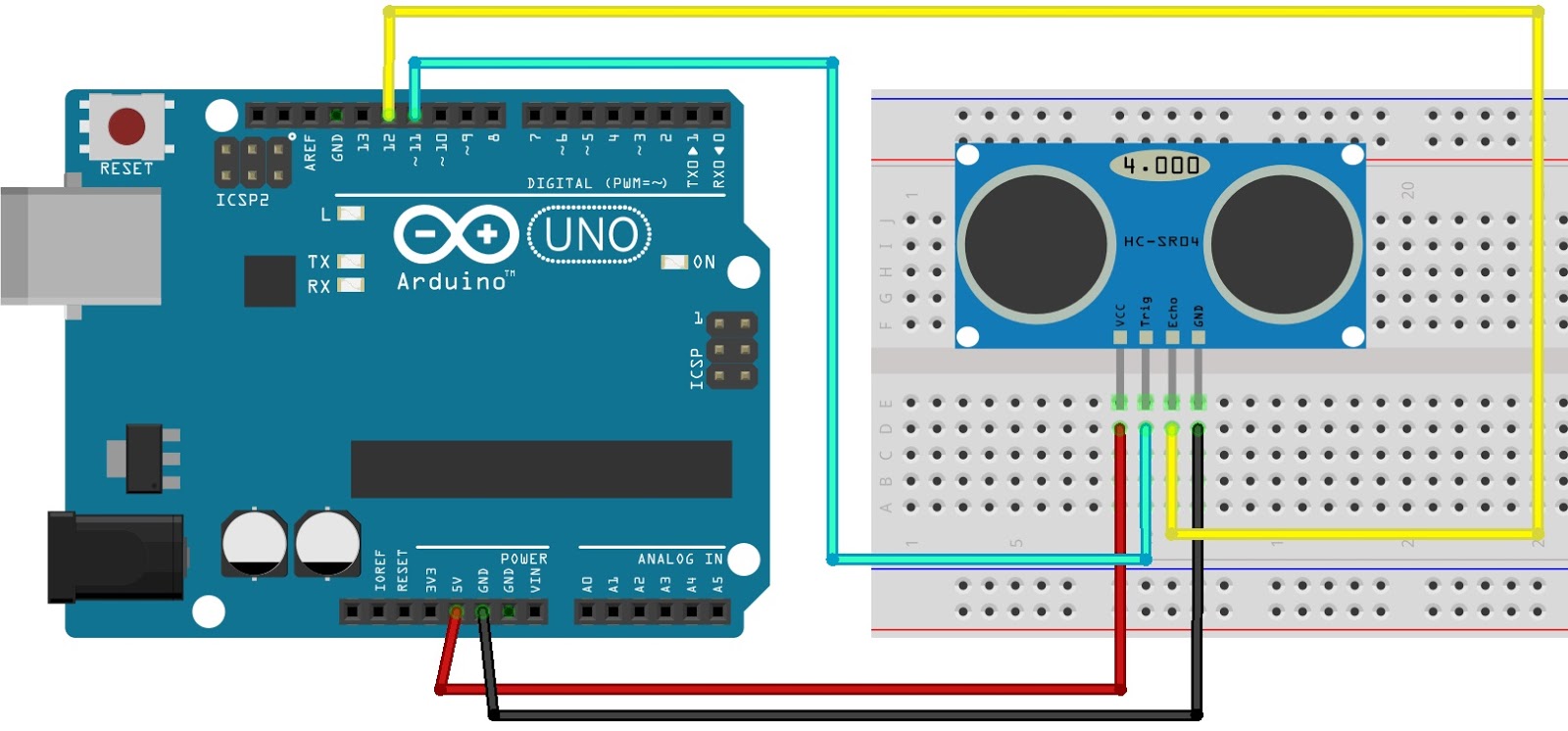
The following table shows the connections you need to make:
VCC 5V
Trig Pin 11
Echo Pin 12
GND GND
Code
Upload the following code to your Arduino IDE.
/*
* created by Rui Santos, https://randomnerdtutorials.com
*
* Complete Guide for Ultrasonic Sensor HC-SR04
*
Ultrasonic sensor Pins:
VCC: +5VDC
Trig : Trigger (INPUT) - Pin11
Echo: Echo (OUTPUT) - Pin 12
GND: GND
*/
int trigPin = 11; // Trigger
int echoPin = 12; // Echo
long duration, cm, inches;
void setup() {
//Serial Port begin
Serial.begin (9600);
//Define inputs and outputs
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
// Convert the time into a distance
cm = (duration/2) / 29.1; // Divide by 29.1 or multiply by 0.0343
inches = (duration/2) / 74; // Divide by 74 or multiply by 0.0135
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(250);
}



No comments:
Post a Comment